汽车的自动驾驶功能引起了广泛关注,它既是科技进步的标志,但也面临诸多挑战。在自动驾驶技术领域,功能叠加的理念在复杂环境中表现不佳,然而,端到端自动驾驶以及大模型技术的运用,为未来发展提供了新的机遇和指引。
现行自动驾驶技术的短板
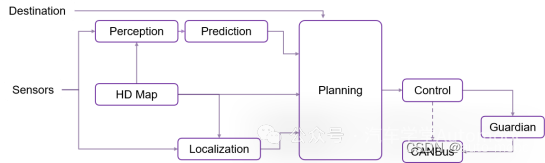
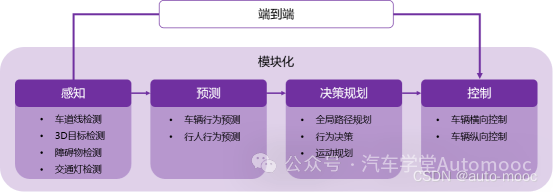
自动驾驶各模块独立研发,这种做法看起来挺高效。就拿某个测试中心来说,单独测试各项功能时都挺出色。然而,一到实际道路,尤其像交通高峰期的繁华市区,各种意外情况层出不穷,这种功能叠加的自动驾驶系统就显得力不从心。它难以根据周围环境做出全面判断。它难以将各自的优势有效整合到实际驾驶中,这确实是个大难题。
调查发现,大多数人对自动驾驶在路况简单时表现满意。但一遇到复杂的路况,系统的表现就显得不够智能了。
端到端自动驾驶的兴起
2016年,英伟达推出了一篇关于端到端自动驾驶的论文,这标志着相关研究的起点。到了2023年,在CVPR的最佳论文评选中,端到端自动驾驶技术不断取得进展。在多个无人驾驶测试场地,人们开始运用端到端技术来全面审视自动驾驶系统。例如,通过利用海量的图像数据来训练神经网络,可以直接计算出方向盘的转向角度等操作指令。

端到端系统与功能叠加型系统不同,它不需要各个模块单独运行。测试显示,在模拟的复杂交通环境中,端到端系统的应对成功率正在稳步上升。
大模型对自动驾驶的意义
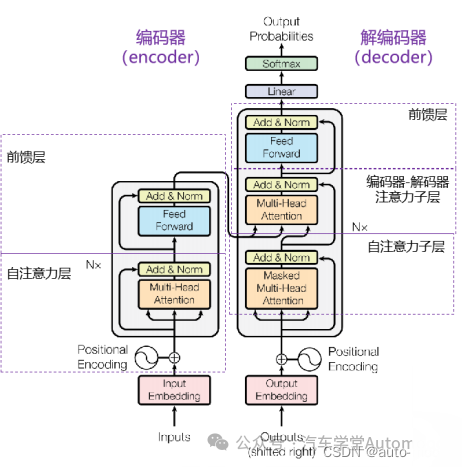
大模型因其庞大的参数和丰富的数据训练资源,吸引了众多企业。它们纷纷投身于自动驾驶领域,尝试利用大模型进行预训练和自动标注数据。这样的做法能有效降低人力和时间成本。一些企业在测试中运用大模型挖掘长尾数据,这不仅增加了数据的多样性,还增强了自动驾驶系统应对复杂情况的能力。
大模型在数据处理方面表现出卓越的推广能力。以往,车载系统面对罕见数据时往往难以应对,但如今大模型的应用能显著减轻这一困扰。
大模型在车端感知系统的渗透
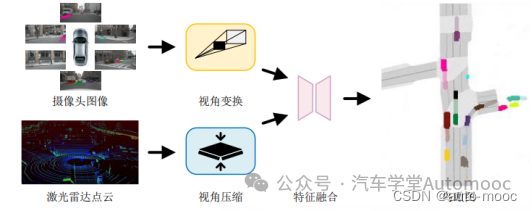
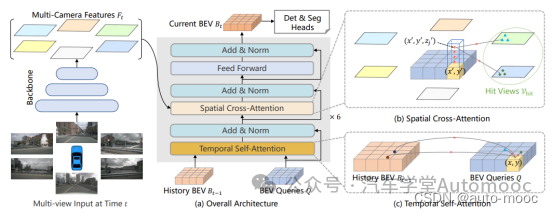
感知模块在自动驾驶中起着至关重要的地位。自2011年起,该模块的模型经历了多轮升级。目前,大型模型主要服务于感知系统。例如,在部分概念车展示中,采用了BEV等大型模型,这些技术显著增强了车辆对周围环境的感知能力。
在现实驾驶场景中,采用大型模型感知技术的汽车表现优异,它们能更精确地识别道路、其他车辆和行人。而且,这些汽车正逐步进步,开始尝试预测和规划功能。
感知方案的两种模式之争
感知深度信息,感知模块主要依赖两种方式:一是纯视觉方案,二是结合多种传感器的技术。纯视觉方案旨在通过视觉学习来提升空间感知。比如,一些专注于纯视觉方案的团队在训练系统时,会采用大量实验图像,这样车辆就能从二维图像中识别出三维空间。

多种传感器数据被整合于这项技术之中。在能见度不佳的恶劣天气,比如大雾中,该技术能更高效地搜集车辆周围信息。不过,要达到多传感器间的有效协调,必须投入大量的研发力量。
轨迹预测的优化
预测轨迹需要整合多种数据。仅依赖神经网络进行预测,信息覆盖面不足。引入CNN-LSTM等混合神经网络结构,可以增强预测的准确性。在交通环境模拟测试中,这种混合神经网络结构比单一神经网络预测更精准,减少了误差。它能全面分析更多变量,保障预测结果的安全与可靠性。
自动驾驶技术不断向前发展,我们看到它从简单的功能组合演变至全面端到端自动驾驶,并广泛运用大模型技术,变革十分明显。这些新兴技术能否真正保障自动驾驶在未来的安全性及效率?我们期待大家的点赞、分享和热烈讨论。

